
Throughout the several years leading up to the spring of 2017 I became increasingly interested in multi-rotors, the concepts behind them, and the flight characteristics that were possible with such a type of aerial platform. In March of 2017 after months of research I finally pulled together a set of hardware that would eventually become ALIE 1.0, my first quad-rotor.
The parts used consisted of:
- 3DR Pixhawk 1 Flight Controller and Parts Kit
- DJI Flamewheel F450 Frame
- Phantom 2 Motors and Propellers (Two CW&CCW Pair)
- Castle 25A Multi-Rotor ESCs (One with BEC)
- Gens ace 2200mAh 3S 25C LiPo
- FrSky X8R 16 channel SBUS receiver
- FrSky X9D+ 16 Channel Transmitter
Assembly went smoothly, and in no time I had it hooked up to Mission Planner via USB for setup.
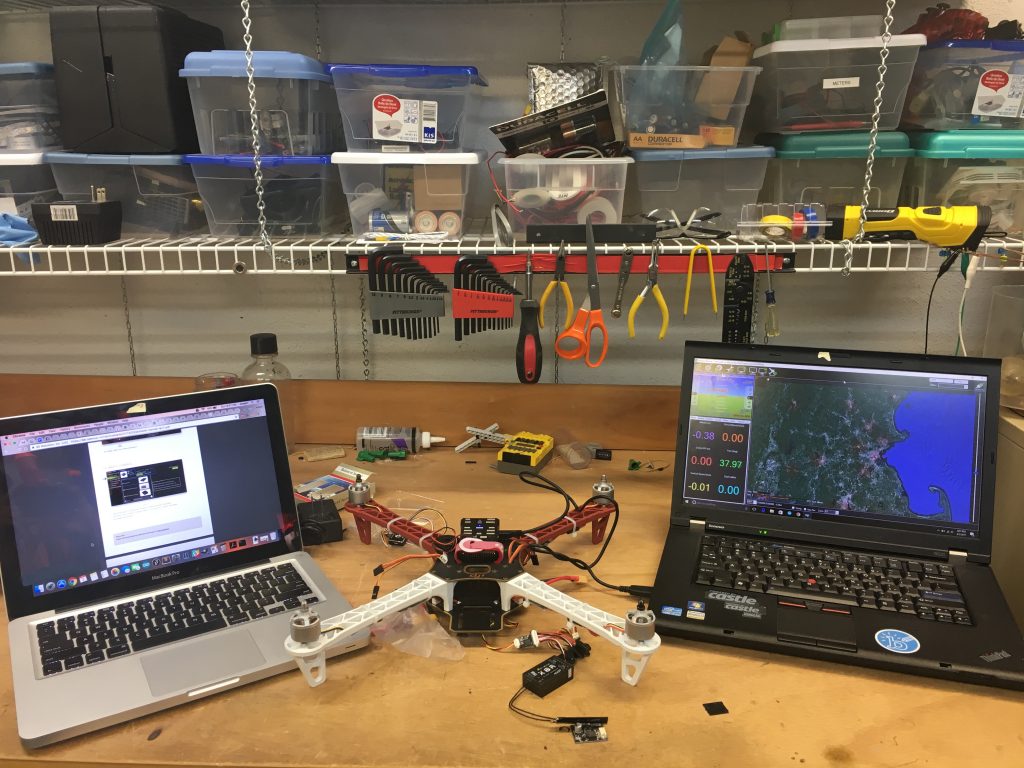
I spent some time figuring out the configuration process and getting all the radio channels lined up to the right functions on the flight controller. It was my first time using any flight controller and I only had the help of the internet (intense foreshadowing right there…) so it took a while to figure out how everything worked. Soon I was able to bring it out to the back yard for an initial test flight. Things were looking good! It could get off the ground and seemed somewhat controllable, but because I didn’t know how to fly I was unable to keep it in open space and promptly crashed it into a fence. No worries, I just needed to find a nice big open field to learn to fly right?
I headed out to the largest field near me and got set up. I armed the copter and took off. It was awesome! Seeing something I had built fly for the first time was amazing! One small hiccup though, for some reason the yaw was reversed making it hard to control. I set it down and connected it to my laptop to see what was up.

…Which is precisely when windows decided I needed to be forced to update. Turns out there wasn’t any wifi in my local field, so it sat there spinning, trying to update but being unable to due to the lack of connection.
No big deal I figured, I had the RC channel mappings written down on my phone, I can just reverse the yaw control on the RC controller instead of on the flight controller. A few painful menu navigations later and everything looked good! Time to put it back in the air!
Now is a great time to mention I went into this project totally blind with no DIY RC experience or UAV experience whatsoever. I wanted to keep things as cheap as possible while still being good quality, so I didn’t skimp on the parts I did purchase, but I did leave off a few parts such as telemetry radios and a GPS figuring I’d buy those at some later date.
And so, with the RC controller being the only link to this quad, I armed it for what would be the final time. It turns out I had in fact not reversed the yaw channel but had remapped throttle to a new input on my controller. As soon as it was armed, it took off at half throttle and kept climbing. I was unable to figure out which input was controlling the throttle, so I helplessly watched it climb out of sight into the low cloud cover. It turns out with the controller I was using, each input is mappable to any given channel. The channel I had set for throttle had no input mapped to it, defaulting to a 50% signal. In addition I had not set an all-motor stop switch as I didn’t know it was a thing. The last mistake was how the receiver was set up. When it lost connection to the controller instead of setting all channels to zero it continued to output the last received values. This meant whenever I turned off the controller it didn’t make a difference to the throttle value the flight controller was receiving. Because there was no GPS I had no geofence set, and because there were no telemetry radios I couldn’t track it or kill it from my laptop (which was incapacitated by Windows at the time anyway).
I learned an extremely valuable and expensive lesson on failsafes, pre-flight checklists, and general UAV flight procedures that day. I never recovered the copter. I drove around the surrounding woods for hours with the controller, hoping to get close enough to reconnect and have some idea of where to look for it but never got a signal. Luckily where I was it’s very likely it (relatively) harmlessly set down in the woods somewhere instead of crashing on a roadway or anywhere populated, but that is not a reason to ignore standard safety practices. In all my vehicles I now check radio failsafes, radio kill switches, and telemetry-based kill switches each time I power up, before attaching propellers.
The moral of this story is that while DIY UAV’s can be awesome and fun, it is incredibly important to learn relevant safety practices before taking flight. I would definitely recommend starting out with someone who knows what they’re doing if at all possible to avoid as many beginner’s mistakes as possible. Always remember what goes up must come down, and that means the responsibility is on you to make sure it doesn’t injure anyone or damage any property on its way down.



