
After the devastation of losing ALIE 1.0, I thought through all the shortfalls of the platform and piloting errors I had made and started work on my second quad-rotor, ALIE 2.0.
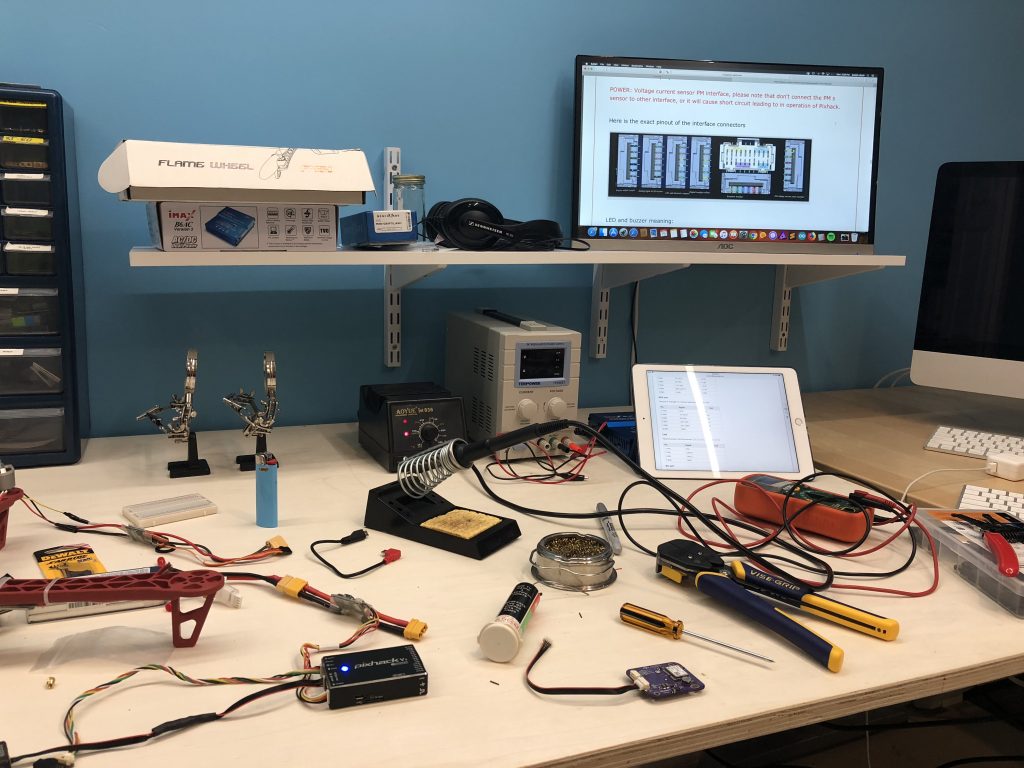
Most of the hardware was the same, with the exception of the flight controller and the addition of telemetry radios:
- CUAV PixHack V3 Flight Controller and Parts Kit
- CUAV USB telemetry radios
- DJI Flamewheel F450 Frame
- Phantom 2 Motors and Propellers (Two CW&CCW Pair)
- Castle 25A Multi-Rotor ESCs (One with BEC)
- Variety of 3S and 4S batteries
- FrSky X8R 16 channel SBUS receiver
- FrSky X9D+ 16 Channel Transmitter
- mRo GPS u-Blox Neo-M8N Dual Compass LIS3MDL+ IST8310
- CUAV PixHack GPS module
The main reason for the switch from PixHawk to PixHack was the connector types each used for interfacing with components. The PixHawk used DF13 connectors, which were a huge pain to work with and relatively prone to breaking. The PixHack instead used micro-JST connectors, which had a significant easier-to-use and more robust locking mechanism.
Basic assembly went pretty quickly after I decided on parts.

One big hiccup with my initial parts list involved the combination of the PixHack and mRo purple GPS. It turns out the PixHack interfaces were not in fact DroneCode compatible, and the first time I plugged in the purple GPS it totally blew out a ground trace. I did manage to troubleshoot and temporarily “fix” this problem:
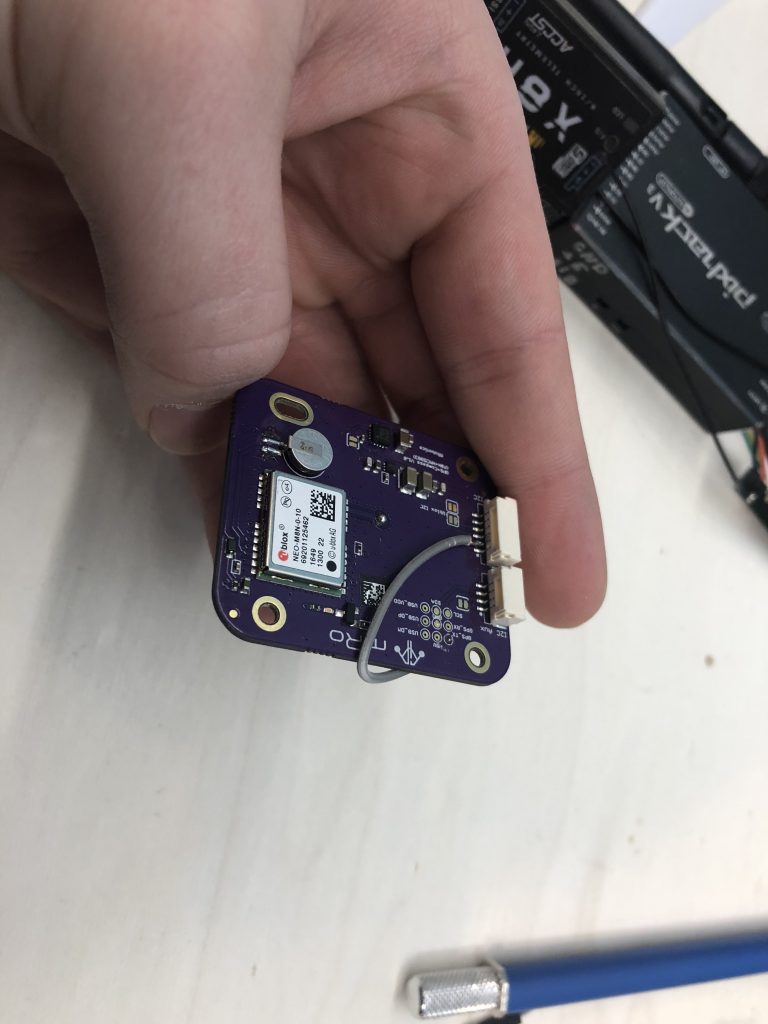
But in the end I was never able to get the PixHack to recognize the GPS, so I just ordered a CUAV GPS module and waited for that to ship.
The GPS arrived, I mounted it on an aluminum/carbon fiber foldable GPS mount and started learning to fly over a local cranberry bog!

I mounted a Raspberry Pi and Pi Camera underneath the chassis with the help of some DJI landing gear, and started taking a few photos:




As I got more comfortable with the platform I started testing some of it’s limits:
The first limit I found was from the GPS mount. It turns out the copter could pull so many G’s on sharp turns at high speed that the GPS mount actually just snapped off, nearly bringing down the whole machine. Fortunately it kept flying and I was able to safely land it.
…However, that still didn’t stop me from crashing it many times due to pilot error alone:

But overall, ALIE 2.0 was a huge success! I now have a relatively robust aerial platform to start experimenting with autonomy, companion computers, wireless networking, and aerial photography. It’s also just a lot of fun to fly!




